A* Route Planning Algorithm
In this project, I have implemented A* route planning algorithm in C++. Given the inital and goal position on a real-world map, the algorithm will compute an optimal path in term of distance.
The map is downloaded from OpenStreetMap. The data structure used in A* algorithm, i.e., RouteModel is derived from a base class Model defined in the example codes in IO2D library. IO2D library also visualizes the result. Further the project requires pugixml library which is included in the thirdparty folder.
Cloning
When cloning this project, be sure to use the --recurse-submodules flag.
git clone https://github.com/yangfan/Astar-Route-Planning.git --recurse-submodules
Compiling and Running
Compiling
To compile the project, first, create a build directory and change to that directory:
mkdir build && cd build
From within the build directory, then run cmake and make as follows:
cmake ..
make
Running
The executable will be placed in the results/bin/ directory. At root path of the project, you can run the project as follows:
./results/bin/OSM_A_star_search
Or to specify a map file:
./results/bin/OSM_A_star_search -f ../<your_osm_file.osm>
For example:
$ ./results/bin/OSM_A_star_search
To specify a map file use the following format:
Usage: [executable] [-f filename.osm]
Reading OpenStreetMap data from the following file: ./data/map.osm
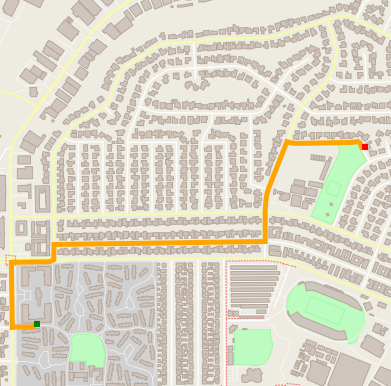
Please input the start_x:
10
Please input the start_y:
20
Please input the end_x:
90
Please input the end_y:
60
Distance: 982.793 meters.
The output path is shown in figure above.
Summary of A*
A*(map, initial_position, goal_position)
-
Initialization
- start_x, start_y, end_x, end_y
- create RouteModel from given map
- for all nodes
- g = inf, h = euclidean distance to the end node, visited = false, explored = false
- g(start_node) = 0
- add the start node to the open list
-
While the open list is not empty
- sort the open list by f = g + h
- current node becomes the node with the least f value, marked as visited, deleted from open list
- if current node is the goal node
- break
- else for each unvisited neighbor of current node
- compute g = g(current) + dist(current, neighbor)
- if g < g(neighbor)
- mark parent(neighbor) = current
- g(neighbor) = g
- if neighbor is not explored yet
- add neighbor to the open list
- mark neighbor as explored
-
if current node is the goal node
- find path by sequentially travelling parent of nodes starting from the current node
- else no path is found
Repository
Credits
This project is created based on the course metrials of Udacity C++ Nanodegree Program.